




安定した走行を実現する新技術「リンク式サスペンション」とは
安定した走行を実現する新しい技術「リンク式サスペンション」
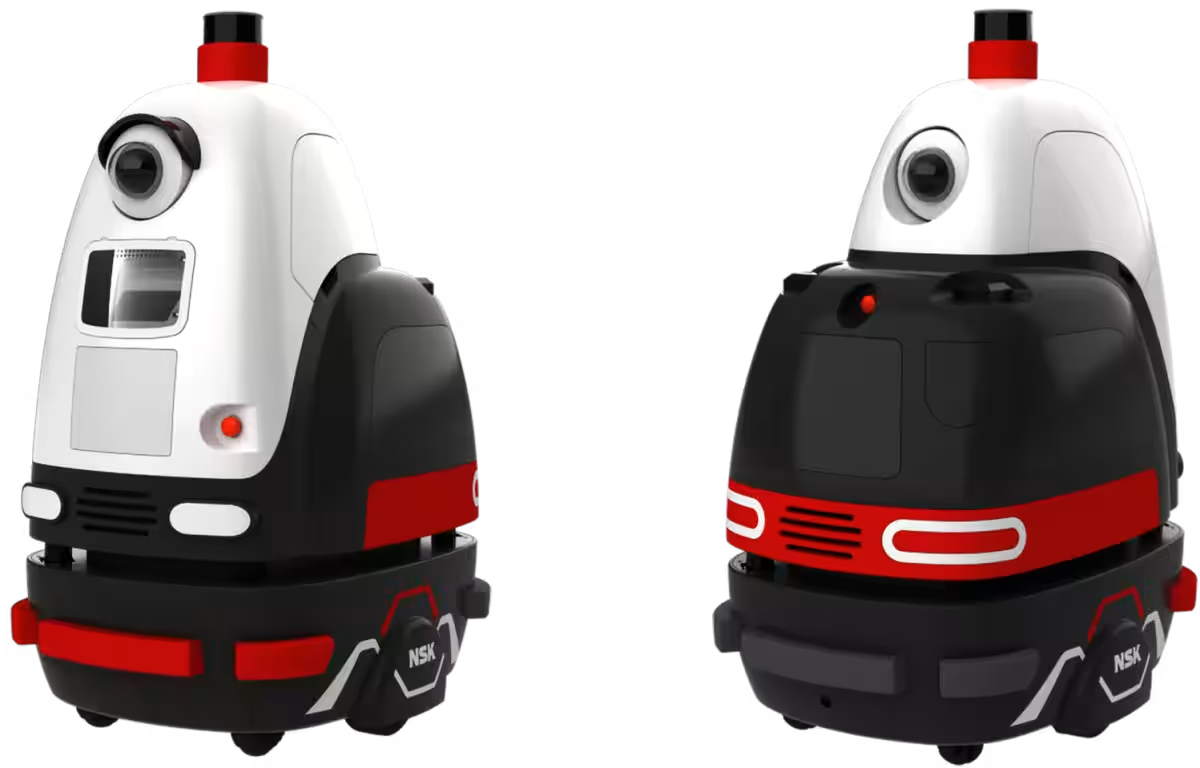
日本精工株式会社(NSK)は、2023年からサービスロボット向けプラットフォームの開発を進めています。その中でも特に注目すべきは、「リンク式サスペンション」という新技術です。この技術は、路面の凹凸や傾斜のある環境でも安定した走行ができる重要な構成要素となっています。2027年を目指して市場投入が計画されており、これに向けた実証実験が立命館大学との協力で進行中です。
「リンク式サスペンション」の技術的意義
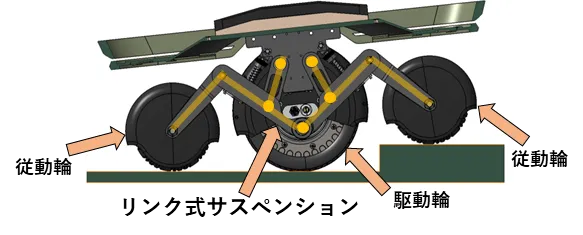
リンク式サスペンションは、パンタグラフ型のリンク機構を介して駆動輪と従動輪をつなげ、屋外環境の難しい条件にも対応します。この装置は、段差や不整地であっても安定した走行を可能にし、サービスロボットの性能向上に直結しています。たとえば、学校や飲食店、宿泊施設などでの実際の運用を想定した設計となっており、幅広いユースケースに対応することができます。
開発の背景と目的
近年、人手不足が深刻化する中、サービスロボットの需要は急速に高まっています。しかし、屋外の整備されていない路面や段差が多い環境では、ロボットが実用化されるには技術的な課題が残っていました。NSKは、これまで培ったベアリング技術を活かしつつ、新たなビジネス展開「Bearings&Beyond」を目指してこのプラットフォームの開発を進めています。
立命館大学との実証プロジェクト
2024年から行われる立命館大学での実証プロジェクトでは、屋外警備ロボットの実用化を目指す取り組みが行われています。大阪いばらきキャンパスでの実証実験では、NSKが開発したリンク式サスペンションを搭載したロボットが、段差やスロープに対して優れた安定性を発揮する様子が確認されています。このプロジェクトは、国内でも先進的な試みとされており、より現場ニーズに即した機能の搭載を試みています。
実証実験の内容
立命館大学の協力のもと、NSKは大阪いばらきキャンパス内でリアルな環境での実証実験を実施。ロボットには、赤外線ライトやAI画像解析技術が搭載されており、暗闇においても不審者や危険物を高精度で検出することが可能です。また、GNSS(全球測位衛星システム)を活用し、ロボットの位置情報を把握することで安全な巡回が実現されています。
今後の展望
今後、NSKはこのプラットフォームの機能をさらに高めるため、様々なユースケースでの実証実験を行う予定です。これにより、教育機関や飲食店、工場などはもちろん、広範なサービス業における自動化のニーズに応える機能を提供していく方針です。最終的には、2027年を目処に社会のニーズに適したサービスロボットを市場に投入し、安定した社会インフラの構築に貢献することを目指しています。
NSKは100年以上の歴史を有する企業で、その理念は「MOTION & CONTROL™」を通じて社会に役立ち、地球環境の保護を目指すものです。未来のロボット技術がどのように我々の日常生活を支えていくのか、非常に楽しみです。







関連リンク
サードペディア百科事典: 立命館大学 サービスロボット リンク式サスペンション
トピックス(その他)







【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。