





スズキの先進的なインフラ管制自動走行システムがKRPで実証実験開始
未来の交通を創る実証実験
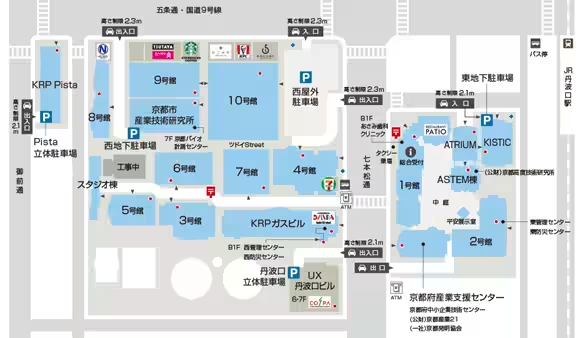
京都リサーチパーク(KRP)が、2026年春からスズキの新しい「モビリティ連携基盤」を用いた、自動走行のインフラ管制システムの実証実験を開始します。この実験は、KRP地区内の駐車場にて行われ、最新の技術を駆使して安全な自動走行の実現性を検証します。
KRP未来実験場の概要
KRPは、場所の特性を活かして、企業や団体に対し実証実験の場を無償提供しています。このエリアは約59,000㎡に及び、18棟の建物には510社、6,000人が集結しており、新しい取り組みが日々試されています。ここは、ビジネス拠点であると同時に、技術革新のための実験フィールドであり、各種新技術の開発に向けた挑戦を行う場として注目されています。
スズキの実証実験活動
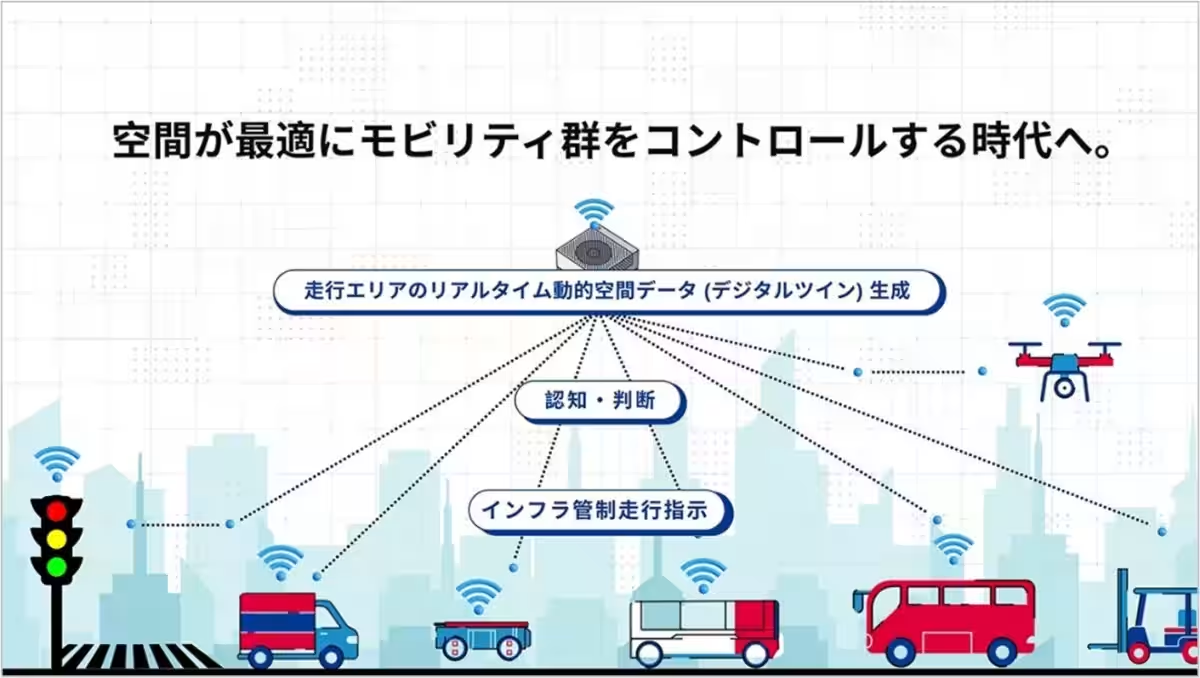
今回の実証実験は、駐車場内に設置したLiDARを使用し、障害物や動的情報を収集し、リアルタイムのデジタルツインを生成します。このデジタルツインは、現実の空間を仮想的に再現する技術であり、モビリティの動きの制御に役立てられます。スズキは、このシステムを用いて、モビリティが自らセンシングを行うことなく、自動走行を実現する方法の検証を行います。
プロジェクトの背景
KRPはこれまでに、株式会社ハイパーデジタルツインと芝浦工業大学の研究室との連携企画を行ってきました。この経験を基に、スズキとは新たに実証実験のフィールド提供に取り組むことになりました。これにより、実験時に必要な条件を満たす優れた環境が得られ、スズキはKRPを選択しました。
実証実験の具体的な方法
この実証実験は、以下のように進められます。まず、駐車場内に複数台設置されたLiDARセンサーが、リアルタイムで空間情報を取得します。その情報を基にデジタルツインを生成し、モビリティへと指示を無線通信で送信します。これにより、モビリティ側にはセンサーが搭載されなくとも、リアルタイムでの運行制御が実現します。この新しいシステムは、コスト削減や軽量化、安全性の向上を目指しています。
期待される成果
本技術は、従来の自動走行研究において抱えられるセンサーの必要性を排除し、インフラ側で運行を管理することで、同一環境下における複数のモビリティの協調走行を可能にします。これにより、今後の公共交通機関や配送システムなどに活用される可能性が広がっています。スズキの杉村部長は、「この実証実験を通じて、社会実装に向けた技術的な課題を明確にし、新たなモビリティインフラの実現を目指します」と述べています。
KRP未来実験場の位置づけ
KRPは、1989年に開設された日本初の民間運営によるサイエンスパークで、創発を目指した多様な企業や団体が集まっています。ここでは、新たなビジネスの創出や、産学連携によるイノベーションが進んでおり、未来の交通システムを実現するための重要な役割を果たしています。今後もKRP地区は、様々な技術革新の実験フィールドとして機能し、京都らしい新しい挑戦が続くことでしょう。

トピックス(その他)






【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。